
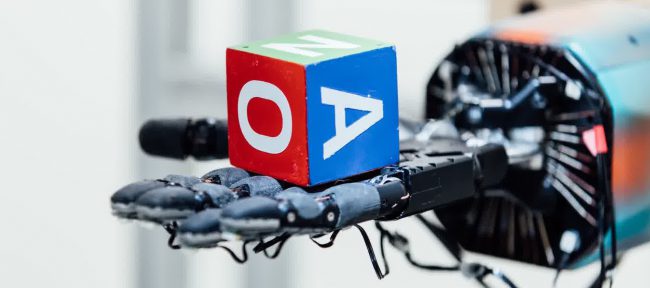
Мы все не раз удивлялись возможностям роботов компании Boston Dynamics. Однако последние наработки некоммерческой организации OpenAI, занимающей исследованиями в области технологий искусственного интеллекта, даже на фоне робо-псов Boston Dynamics выглядят как совершенно иной, более продвинутый уровень. OpenAI представила Dactyl – ИИ-систему, обученную управлению роботизированной рукой. Казалось бы, чего тут впечатляющего? Объясняем. Dactyl – это система, позволяющая роботизированной руке манипулировать физическими объектами на уровне, ранее недостижимом ни одной ИИ-системе. В перспективе система будет способна наделить робота физическим параметром ловкости.
О полноценном уровне ловкости роботизированного тела речи пока не идет, но инженеры OpenAI наконец-то заложили основу.
Ловкость рук и никакого мошенничества
Пожалуй, одним из самых прекрасных инструментов, которым нас наделила мать-природа являются руки. Именно человеческие руки, а ни какие-либо другие, включая конечности самых продвинутых обезьян, способны так тонко управлять своими пальцами. Инженеры-робототехники всеми силами пытаются адаптировать ловкостью человеческих рук в своих железных протеже, но каких-то очевидных и значимых подвижек в этом направлении не было уже давно.
Разработанная OpenAI система Dactyl предназначена для, казалось бы, самой простой задачи, с которой справится даже ребенок. Разве для нас сложно взять в руку, скажем, кубик с нанесенными на каждую из его сторон рисунками и перевернуть его на нужную сторону? Для нас, людей, эта задача не составляет никакого труда. Для робота – это настоящая пытка. Но благодаря мощным компьютерам исследователи смогли-таки обучить машину этому трюку всего за 50 часов.
Все дело в практике

Обучение системы Dactyl проходило в симуляционной среде. Для этого инженеры создали цифровую копию руки и поместили ее в компьютерную среду, работающую по принципу рандомизации. Инженеры задали определенный набор параметров для среды (например, размер кубика, гравитацию), а затем стали случайно менять эти переменные. Для более быстрого обучения системы исследователи создали сразу несколько таких виртуальных рук. Научив Dactyl адаптироваться к большому разнообразию возможных сценариев внутри виртуальной среды, ученые наделили ИИ-систему опытом, необходимым для адаптации к тем или иным сценариям задачи в реальном мире.
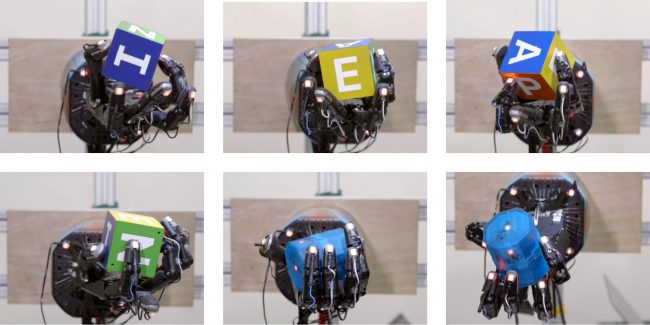
Спустя 50 часов тренировок внутри виртуальной среди ИИ-система научилась управлять реальной роботизированной рукой и выполнила 50 поставленных перед ней задач: провернуть кубик на ту или иную сторону, не уронив его и уложившись в 80 секунд для решения одного задания. Для того чтобы система могла «понять» в какую сторону поворачивать кубик, она использует набор камер.
На своем разработчики Dactyl поясняют, что в качестве основы для новой системы они применили алгоритм OpenAI Five, ранее разработанный для создания команды из 5-ти нейронных сетей, способных командно играть в DOTA 2. Эту цифровую братию мы с вами сможем увидеть на главном кибертурнире этого года — The International 2018, ежегодно проводимом компанией Valve.
Эффективность Dactyl доказывает возможность создания универсального алгоритма, способного обучать ИИ-систему на выполнение сразу нескольких задач. Главная польза от такой возможности заключается в том, что в будущем это упростит и ускорит сам процесс обучения систем искусственного интеллекта, поскольку разработчикам не придется с нуля создавать и обучать новые ИИ для решения тех или иных новых задач.



